Mua ngay tại
Mô tả
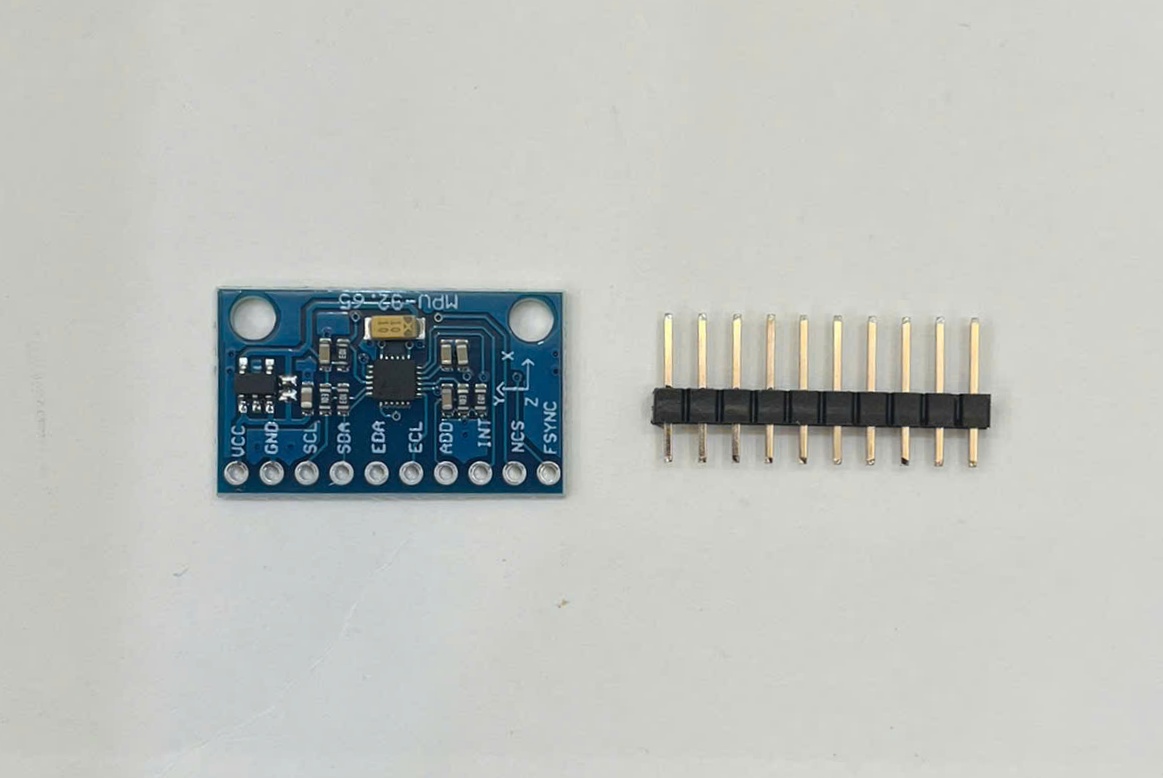
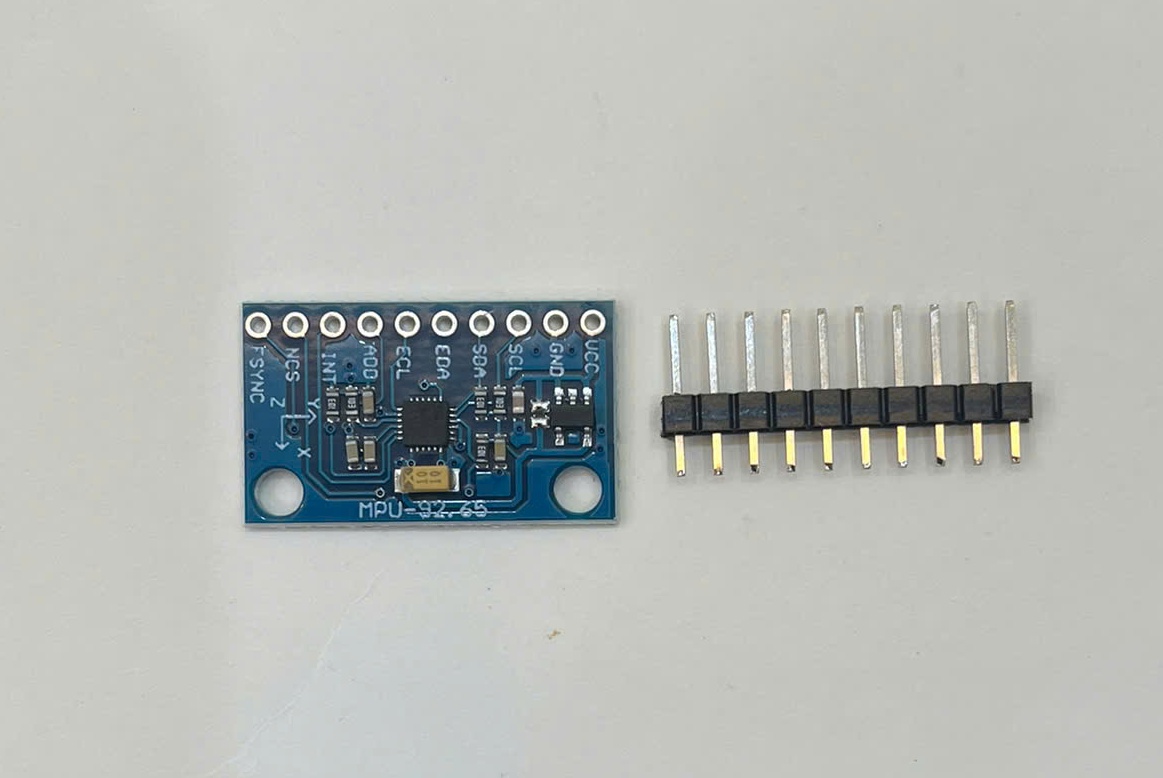
MPU-6500 là giải pháp theo dõi chuyển động 6 trục (6-DOF) hiệu suất cao, thay thế cho dòng MPU-6050 với mức tiêu thụ điện năng thấp hơn và kích thước nhỏ hơn. Module tích hợp sẵn bộ xử lý chuyển động kỹ thuật số (DMP) giúp tính toán các thuật toán phức tạp, giảm tải cho vi điều khiển chính.
Hướng dẫn sử dụng
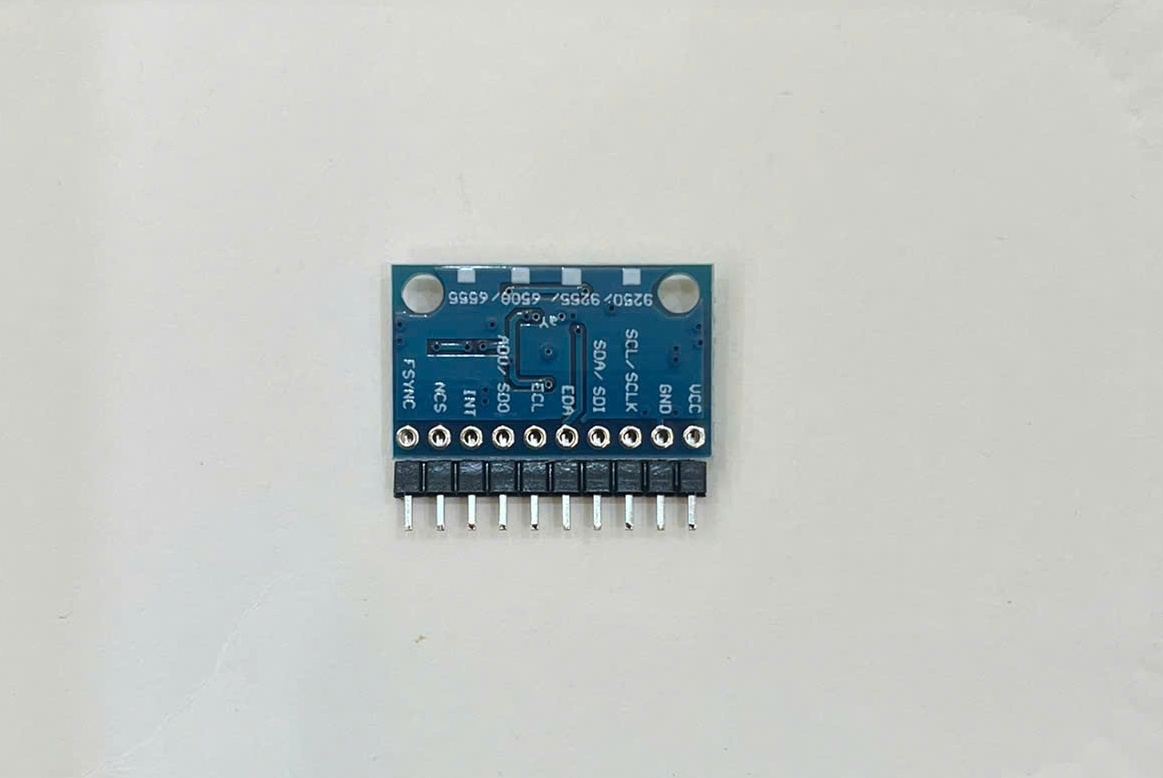
- Bước 1: Kết nối nguồn - Chân VCC nối 3.3V hoặc 5V, chân GND nối cực âm. Lưu ý: Chip MPU-6500 thực tế chạy 1.8V-3.3V, nhưng module GY thường có sẵn IC hạ áp.
- Bước 2: Chọn chuẩn giao tiếp - Mặc định dùng I2C (SCL/SDA). Nếu dùng SPI, cần kết nối các chân SCL (SCLK), SDA (MOSI), AD0 (MISO) và NCS (CS).
- Bước 3: Cài đặt địa chỉ I2C - Chân AD0 dùng để chọn địa chỉ. Nếu nối GND, địa chỉ là 0x68. Nếu nối VCC, địa chỉ là 0x69.
- Bước 4: Khởi tạo phần mềm - Sử dụng các thư viện như MPU6500_t3 hoặc MPU9250 (tương thích ngược) để đọc giá trị RAW từ cảm biến, sau đó tính toán góc nghiêng.